A che punto è l’antenna tecnologica di Ambarella a Parma?
Il VisLab, laboratorio emiliano pioniere nella guida autonoma da un quarto di secolo, è all’avanguardia nel banco di prova più complesso tra le applicazioni per deep learning e A.I., e oggi ha aperto le sue porte
A Parma, dove sorge nel campus dell’Università, Alberto Broggi e i suoi collaboratori volevano festeggiare il 25.esimo “compleanno” della loro “MilleMiglia in Automatico”, affrontata in 6 giorni all’inizio del giugno 1998. A quell’evento era seguito il 12 luglio 2013 l’esperimento PROUD con un’auto in moto sulle strade della città emiliana senza nessuno seduto al volante.
Da quelle pietre miliari fondamentali nell’aprire al futuro della guida autonoma, a partire dal 2015 con l’acquisizione da parte del produttore californiano di chip Ambarella sono seguite altre sfide e altre aspettative per i pionieri di Parma.
Quel pugno di scienziati che lavorava con PC e usava 2 telecamere sulle sue auto (prese da citofoni!) da anni si è spostato sui SoC in cui è specializzata l’azienda di Santa Clara, e quanto alle camere sul veicolo presentato all’ultimo CES di Las Vegas erano 18 e ovviamente 4K.
Ma la ricorrenza del momento che ha messo il VisLab sulla mappa globale della guida autonoma è anche il momento per fare il punto sulla tecnologia. Ciò che fanno a Parma è fondamentalmente mettere a punto il software che testa i chip (oggi nel portfolio c’è il CV3) assicurando i clienti dell’auto, case o fornitori Tier 1, che quel quadratino di silicio sarà in grado di fare quello per cui i clienti lo acquisteranno: guidare un veicolo al posto di un essere umano (come o meglio).
Così il professore emiliano ha dialogato con gli intervenuti sui maggiori temi relativi alla tecnologia della elevata automazione di guida, quella classificata dalla tassonomia SAE come Livello 4 e a cui appartengono i veicoli dell’azienda che da molti anni e da molti chilometri percorrono le strade italiane (e della California e Nevada).
Uno degli approfondimenti più interessanti è stato quello riguardante le scelte sulla sensoristica, che da tempo hanno scartato i sensori laser (o LiDAR) per privilegiare l’interazione di visione e di radar.
La spiegazione non è ideologica (come appare essere nel caso della sensoristica Tesla che insegue le idiosincrasie del suo amministratore delegato) ma a valle di un impiego dei LiDAR sul campo: visione e laser si sovrappongono come capacità di fornire dati, mentre al contrario visione e radar, che è in grado di fornire dati molto densi, si integrano e completano.
Questa compenetrazione delle qualità migliori di visione e radar favoriscono la ricerca di Broggi e dei ricercatori italiani e americani di arrivare a controllare tutto lo stack. E questo spiega pure perché Ambarella dopo aver assorbito la startup di Parma abbia scelto come acquisizione più strategica quella di Oculii, l’azienda dell’Ohio specializzata proprio nei radar e nella quale in precedenza aveva già investito anche General Motors.
Ma la sensoristica è solo uno stadio per arrivare alla piena automazione nella guida: quello che la percezione nella guida autonoma raccoglie, deve essere seguita dalla elaborazione efficiente dei dati a bordo veicolo.
In questa fase in cui dall’esplosione del fenomeno di ChatGPT alla frenesia borsistica per le azioni di Nvidia l’A.I. è diventata una chiave che sembra poter aprire tutte le porte, la conversazione con Broggi è apparsa un intervento che secoli fa sarebbe piaciuto a Occam, il filosofo noto per il suo concetto di “rasoio” che rimuove tutti gli eccessi e gli orpelli.
Infatti il fondatore del VisLab ha sottolineato di non gradire il termine intelligenza artificiale, preferendo di gran lunga quello di deep learning. E non certo perché a Parma e al suo organico di circa 80 persone manchi cultura di settore: anzi, una delle cose di cui vanno più fieri è l’aver messo a punto un fenomenale acceleratore di reti neurali, reti che sono il “telaio” vero e proprio su cui si regge e corre l’intelligenza artificiale.
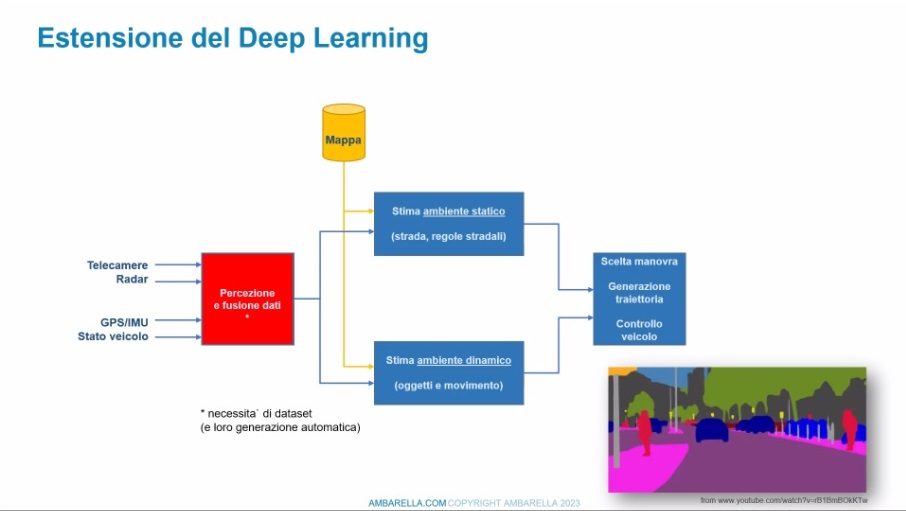
Sì, perché come ha sottolineato Broggi stamattina, la parte “intelligente” del lavoro di aziende come Ambarella è fare il training a sistemi come quelli per la guida autonoma avanzata. E l’intelligenza di cui stiamo parlando è quella umana. Per questo occorre sviscerare ed approfondire i dataset, ma i dati da trattare non sono quantitativi: avere i dataset giusti è fondamentale per il successo.
Un progetto di valore è quindi in grado di creare una selezione non di tanti dati ma di dati giusti. E per arrivare a quell’obiettivo occorre avere, ad esempio come nei laboratori di Parma, la capacità di creare un programma di auto-annotazione del tutto automatico.
Qualcosa che acquisisce nelle simulazioni e sulle strade dati interessanti per la loro particolarità che ne fa casi-limite o eccezionali, oppure individua i problemi di categorizzazione: come un camion scambiato per un’auto o viceversa, e poi in grado di far training su quel caso specifico.
L’auto-annotazione perciò contribuirà a ripulire i dataset fino a renderli sempre più giusti e adeguati a certificare come un chip sia in grado di padroneggiare tutte le situazioni di guida, contribuendo poi sul campo, quando l’auto di Livello 4 della guida autonoma viaggerà su strade aperte al pubblico, a scelte intelligenti nella manovra e nella creazione della traiettoria del veicolo.
Per arrivare al traguardo, sottolinea il leader della sede Ambarella di Parma, non saranno più neppure necessario il contributo di mappe ad alta definizione, preferite invece da alcuni concorrenti, né la creazione di una rilevante e costosa infrastruttura di comunicazione come da anni si sente invece ripetere tra le possibili funzioni del 5G.
Le auto o i SUV su cui sarà basata la guida autonoma che si affida a chip Ambarella di terza generazione o successiva, invece conteranno solo su più modeste (e meno complesse da trattare) mappe SD e “dipingeranno” il resto dello scenario in cui si muovono al volo, “on-the-fly”.
Broggi ha infine ricordato lo scenario regolatorio complesso che circonda le sperimentazioni di guida autonoma su strade pubbliche in Italia, nonché le misure aggiuntive sviluppate e implementate da VisLab per accrescere ulteriormente sia la sicurezza dei test che le abilità di intervento degli operatori di bordo.
Le procedure VisLab di validazione del nuovo software partono con simulazione in laboratorio a cura di ogni gruppo, seguiti da integrazione di tutte le modifiche e simulazione full stack; seguono test in realtà virtuale a cui fanno posto test in situazioni amichevoli per misurarsi solo alla fine del protocollo coi test su strada pubblica.