

Nuovo studio dell’università del Michigan “assolve” sensori e computer energivori
I sistemi per la guida autonoma a lungo termine possono ridurre fino al 9% emissioni e consumi di energia, ma la sfida per l’efficienza è appena all’inizio
Un gruppo di ricercatori guidati da Gerg Keoleian, direttore del Center for Sustainable Systems presso l’università del Michigan, insieme ad alcuni ingegneri Ford hanno messo alla frusta tre tipi di pacchetti di sistemi autonomi su due Focus in versione sia convenzionale che al 100% elettrica.
Così hanno finito per mettere a punto uno studio appena uscito che studia gli impatti ambientali e le ricadute sull’efficienza, sia in termini di consumo di energia che di emissioni, derivanti dall’aggiunta alle auto delle suite di sistemi per la guida autonoma.
Uno degli autori principali dello studio, Jim Gawron, dottorando alla School for Environment and Sustainability dell’università del Michigan, ha commentato: “abbiamo mostrato in questa ricerca che un veicolo elettrico a batteria è una migliore piattaforma per componenti per veicoli a guida autonoma rispetto ai veicoli con motori endotermici in termini di capacità di minimizzare gli impatti ambientali“.
Ma lo studio ha sottolineato anche che i sistemi autonomi anche di livello meno sofisticato possono comunque contribuire con ricadute interessanti dal punto di vista dell’efficienza.
Le soluzioni sottoposte a verifica sono state divise in tre tipi: per cominciare quello minimo di ADAS potenziato (che non prevede sensori laser ma nel migliore dei casi telecamere e sensori ad ultrasuoni).
Quello intermedio che aveva come riferimento le soluzioni Ford per la guida autonoma, aveva quindi sensori più sofisticati incluso il LiDAR. Infine sul gradino più alto c’era un pacchetto di sensori e computer come quello di Waymo.
Si trattava quindi di un elenco di sensori e computer analogo a quello predisposto per le Chrysler Pacifica ibride che hanno appena ottenuto licenza commerciale di effettuare il servizio di robo-taxi senza autista in Arizona.
I risultati dello studio hanno indicato che gli stack meno ambiziosi, in pratica poco più che ADAS avanzati, richiedono ai sistemi tra il 2,8 e il 4% di energia in più. In parte per quello che consumano in più sensori, chip e computer, in parte per una differenza di peso variabile tra i 17 ed i 22 chili, secondo la versione presa in esame.
I risultati delle strategie messe in atto dai sistemi per la guida autonoma però, anche quelle meno sofisticate che equivalgono a cruise control adattivi avanzati, parrebbero sufficienti a compensare quel difetto della fame di energia.
Ovvero: guidare un veicolo dotato di sistemi come un ProPilot Nissan o un Traffic Jam Pilot Audi, può far sì che nel ciclo di vita completo di una auto che ne è equipaggiata si abbia un risparmio del fabbisogno di energia tra il 6 e 9%. E oltre a quello anche una simile riduzione delle emissioni di gas serra.
E se un veicolo al 100% elettrico è meglio preparato a gestire il fabbisogno di energia, anche i motori convenzionali possono beneficiare significativamente delle strategie smart nel traffico.
In alcuni casi del resto si tratta di soluzioni che si traducono in azioni ben note, equivalenti al “succhiare la scia” dei veicoli precedenti o muoversi solo al momento appropriato senza sgasare nervosamente sul pedale.
Quando si passa al pacchetto di Waymo, il più avanzato, già a partire dai sensori sul tetto si nota che su una berlina o un minivan questo comporta un peggioramento dell’efficienza aerodinamica, un 5% sacrificato in resistenza all’avanzamento.
Il professor Keoleian ha indicato peraltro che questo potrebbe essere considerato un effetto del fatto che i pacchetti per veicoli autonomi sono ancora nella loro “infanzia”. E, a ben guardare, a dargli una risposta affermativa qualcuno ha già cominciato.
Come, ad esempio, Toyota: presso il suo TRI americano ha in effetti già provveduto, con la terza generazione di Lexus LS 600hL su cui sviluppa la guida autonoma avanzata, a indicare chiaramente di volere integrare in modo efficiente i sensori nella progettazione, piuttosto che montarli in fretta e furia sulle auto destinate ai test come succedeva inizialmente (la foto di apertura si riferisce a quel periodo).
I ricercatori dell’università del Michigan e del centro ricerche Ford, non hanno nascosto che l’aggiunta di peso e l’aumento di richiesta di energia dei sistemi possono avere impatti significativi.
Secondo i loro calcoli un aumento dell’energia consumata potrebbe perfino comportare una cancellazione dei benefici, ad esempio se la richiesta di energia dovesse superare i 2.000 watt.
Nello scenario adottato come centrale nel modello utilizzato per lo studio, si sono basati su 10 kg di peso per i dispositivi e computer e su un consumo di 200 watt. Con questa impostazione, il computer principale è responsabile del consumo di metà circa dell’energia a disposizione.
Secondo gli autori tra i potenziali sviluppi futuri che potrebbero avere effetti sui consumi di energia delle auto a guida pienamente autonoma c’è il rapido perfezionamento delle mappe tridimensionali. Il tutto favorito da app e sistemi che si appoggeranno anche di più in futuro a questa opportunità grazie allo sviluppo delle reti cellulari 5G.
Anzi, a loro parere se l’uso di mappe 3D dovesse essere anticipato sulla rete attuale questo potrebbe comportare un aumento del consumo dei computer di bordo fino ad un terzo. Mentre sarebbe ancora presto per valutare gli effetti dell’uso di mappe tridimensionali appoggiate al cloud con la rete di nuova generazione.
Preoccupazioni per gli effetti dell’hardware e del software utilizzato sui veicoli a guida autonoma sono appropriate. Peraltro è facile accertare che il rischio di esagerare sembra essere ben presente sia in chi produce hardware sia in chi scrive i programmi per i sistemi di guida autonoma. Entrambi sembrano sapere bene cosa comportano software, sensori e computer energivori.
Machine learning e deep learning sono nati in effetti da tecnologie di computer vision, da sistemi per il riconoscimento di immagini, e se c’è un fattore importante nell’esaminare un pixel dopo l’altro è proprio il modo in cui il programma è in grado di separare i dettagli essenziali da quelli trascurabili.
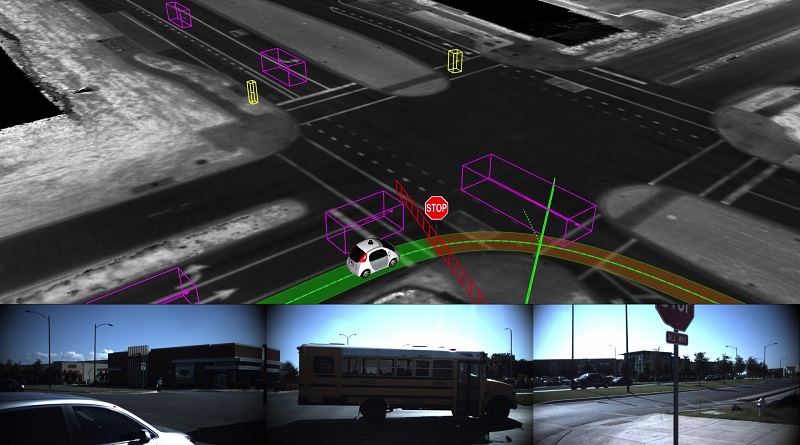
Nelle immagini dei percorsi come li vede un sistema per la guida autonoma la segmentazione semantica e le caratteristiche cornici colorate che identificano tutti gli elementi presenti sono un risultato di una selezione che contemporaneamente esclude i pixel non importanti, in modo da dedicare ogni istante della capacità di calcolo a dettagli rilevanti e non al superfluo.
La stessa determinazione a lavorare a livelli alti di efficienza è presente nei principali protagonisti dell’hardware. Un buon esempio in questo campo è la giapponese Renesas, che da anni è nota per fornire chip che i gruppi auto usano per infotainment e sistemi di sicurezza.
Renesas è anche attiva nel settore dei sistemi per la guida autonoma avanzata, e il suo cavallo di battaglia è proprio l’efficienza, mentre altri hanno scelto la potenza di calcolo, con Nivdia come alfiere ideale di chi punta sulla performance.
La prossima generazione di chip Renesas R-CAR è mirata specificamente al deep learning per la guida autonoma, promette più di 5 TOPS (trilioni di operazioni al secondo) consumando solo 1 watt.
Un confronto sarà utile: Mobileye (la divisione israeliana che è la punta di lancia del colosso dei chip Intel nell’automotive) col prossimo chip EyeQ5 promette 24 TOPS consumando 10 watt, il che implica un raddoppio dell’efficienza per il futuro processore del gruppo nipponico.
A novembre dello scorso anno Andrew Farah, uno degli ingegneri del progetto Cruise Automation che sta rivaleggiando con Waymo per mettere in strada i primi robo-taxi partendo dalle Bolt elettriche, aveva ammesso in una intervista a Car and Driver che i loro primi sistemi di guida autonoma avevano un consumo di energia oscillante tra i 3 ed i 4 kW di energia.
I tecnici della divisione avanzata sulla guida autonoma di General Motors non hanno peraltro rivelato quanto abbia già guadagnato in efficienza la più recente generazione di robo-taxi (o forse potremmo perfino chiamarla versione pre-serie?). Se all’università del Michigan hanno validi motivi di preoccuparsi dei consumi di sensori e computer, sembrano essere tutt’altro che da soli.


