L’auto-robot sviluppata in Finlandia dal VTT che sulla neve ha fatto meglio di Waymo
Si chiama Martti l’auto-robot che a Muonio ha già imparato a viaggiare da sola a 40 km/h in mezzo alla tormenta di neve e su strade prive di segnaletica
Ormai siamo informati quasi quotidianamente delle meraviglie che i veicoli autonomi di Waymo, Cruise Automation, Uber, Voyage & C. stanno compiendo alle prese con le strade e le città americane. Ad essere precisi, però, non sulle strade degli Stati Uniti in generale: più esattamente su quelle degli stati caldi dell’Ovest e Sud-Ovest.
Perché, quando si tratta di condizioni invernali, finora le cose sono state piuttosto diverse. Ma le cose stanno cambiando grazie a quello che avviene nell’estremo Nord d’Europa. Nella patria dei grandi piloti su strada e su pista, la Finlandia, hanno infatti messo a punto Martti: l’auto-robot sviluppata dal VTT.
Quella sviluppata dai tecnici del Centro Nazionale di Ricerca del paese baltico, è la prima vettura autonoma ad avere guidato senza la necessità di interventi umani in condizioni reali su strade coperte di neve e ghiaccio.
Non solo gli ingegneri finlandesi hanno preceduto al traguardo i rivali americani (e senza scordare quelli asiatici), ma Martti è stato in grado di procedere a 40 km/h di media sulla “strada intelligente” Aurora E8, presso Muonio, stabilendo un record ufficioso per un veicolo impegnato su strade coperte di neve e prive di segnaletica.
Far operare un veicolo a piena guida autonoma su un percorso di periferia suburbana con perfetta visibilità e magari con segnaletiche precise e puntuali è un obiettivo che è ormai alla portata. Peraltro quando si parla di ambienti urbani, come a San Francisco, a Pittsburgh, o a Singapore e Tokyo lo stress a cui sono sottoposti i sistemi aumenta vertiginosamente.
In condizioni prettamente invernali le cose peggiorano ulteriormente. I segnali stradali? La visibilità? Tutti punti interrogativi più che risposte. Il che spiega perché sviluppare sistemi di guida autonoma affidabili in condizioni di guida invernali nel Nord d’America o d’Europa sia considerato uno dei due ostacoli più ripidi al diffondersi delle auto-robot (l’altro? Le caotiche metropoli indiane…).
Non a caso, l’amministratore delegato di Waymo (l’azienda che ha ereditato il programma della Google-car) John Krafcik ha comunicato ad ottobre l’inizio dei test in Michigan delle sue Chrysler Pacifica ibride con il tono di chi ormai è in grado di affrontare le prove più difficili. Affrontarle, è chiaro, dopo aver ormai raggiunto un grado elevato di affidabilità nei test fondamentali ma meno stressanti, su piste di prova e strade suburbane di Arizona e California.
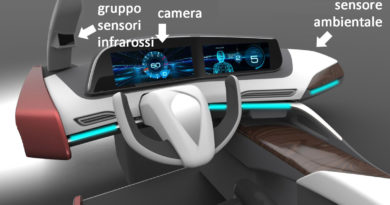
Ma ora scopriamo che quel traguardo sembrano averlo tagliato per primi Martti ed il suo alter ego Marilyn. Nel caso dell’auto-robot sviluppata in Finlandia i tecnici sono partiti da Volkswagen Touareg, intervenendo col montaggio di telecamere, antenne, sensori radar e laser per rifornire di dati i computer di bordo.
I due veicoli messi alla prova dagli ingegneri del VTT avevano diversi schemi di sensori per studiare la funzionalità in condizioni invernali. Su Martti, ad esempio, sono stati installati tre LiDAR puntati anteriormente, mentre Marilyn ne ha due anteriori ed uno che copre l’area posteriore del veicolo.
I tecnici diretti da Matti Kutila hanno poi reso Marilyn (il cui software è stato creato per primo) particolarmente adatta ai percorsi con difficoltà urbane, mentre Martti eccelle invece in condizioni di meteo avverso.
Per l’auto-robot sviluppata in Finlandia i tecnici del VTT hanno puntato sui sensori radar: hanno meno risoluzione ma sono meno sensibili alle tormente
Il “record” di velocità di Martti sulla neve, ha spiegato Kutila nella nota stampa, probabilmente avrebbe potuto essere anche migliore. Ma per i primi test al VTT hanno deciso di non superare quella barriera nelle fasi in cui la guida è in mano ai computer.
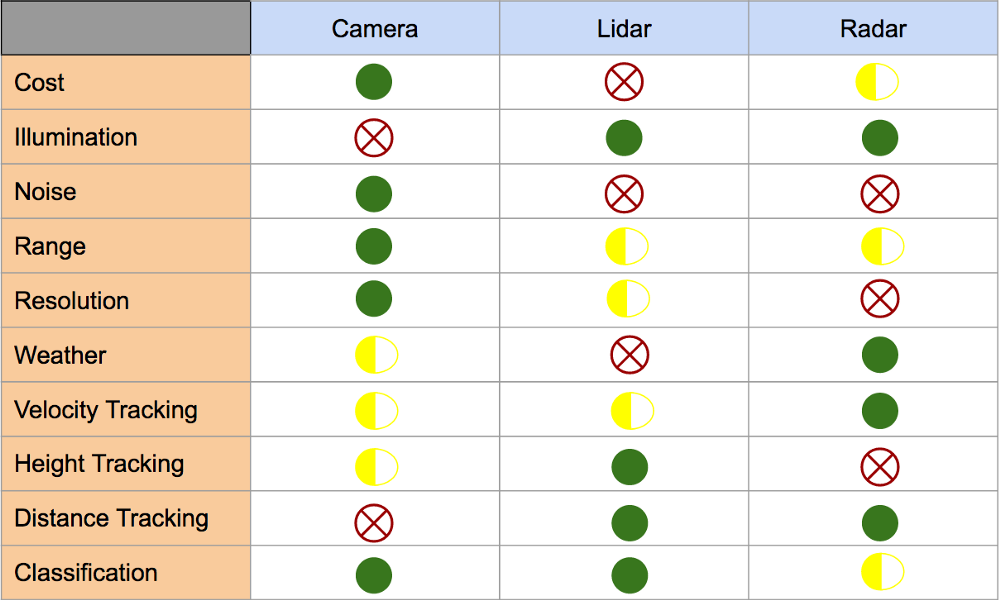
Come hanno scoperto da tempo i tecnici che nei vari laboratori preparano i sensori dei sistemi per la guida autonoma, in condizioni come quelle del Circolo Polare Artico i LiDAR, i costosi ma precisissimi sensori laser che tracciano mappe tridimensionali accuratissime dell’ambiente, possono rivelarsi di scarso aiuto.
Per capire meglio, si può esaminare la tabella che vedete allegata, compilata da David Silver di Udacity, l’organizzazione educativa che offre corsi online aperti dedicati allo sviluppo di sistemi e tecnologie avanzati. La tabella di Silver riassume pregi e difetti dei principali sensori che possono essere destinati a raccogliere i dati necessari a rendere autonoma un’auto-robot.
Il prossimo passo, spiega la nota del VTT, per gli ingegneri finlandesi sarà mettere mano alle lunghezze d’onda dei componenti ottici di Martti e Marylin. Questo dovrà servire ad aumentare la risoluzione del radar, particolarmente utile a raccogliere in condizioni di guida invernali sempre più dati da girare al software di guida.
Per l’auto-robot sviluppata in Finlandia dal VTT a partire dalla metà del gennaio 2018 ci saranno anche novità di equipaggiamento. Sarà dotata di moduli di comunicazione V2X in grado di farla comunicare con l’infrastruttura grazie ai sistemi di telecomunicazioni 5G sui quali la Finlandia punta molto (ma, in questo caso almeno, l’Italia forse non è troppo lontana).
Martti e la sua “consorte” Marilyn finora erano in grado di parlare solo fra loro: la cosiddetta comunicazione V2V. I risultati delle ricerche ottenuti da VTT sono destinati ad arricchire la dote di informazioni dei grandi gruppi europei dell’auto, con cui nel centro ricerca finlandesi sono in contatto.